
Un aspirator robot, cunoscut și sub numele de mașină automată de curățat, aspirator inteligent sau aspirator robotizat, este un tip de aparat electrocasnic inteligent. Acesta utilizează tehnologia inteligenței artificiale pentru a îndeplini în mod automat sarcini de curățare a podelei în interior. Aspiratoarele robot curăță de obicei prin periere și aspirare, aspirând resturile de pe podea într-un coș de gunoi încorporat pentru a realiza curățarea podelei. Datorită ușurinței de operare și confortului lor, aspiratoarele robot au devenit foarte populare și sunt aparate inteligente utilizate în mod obișnuit în casele moderne și în mediile de birouri.
Partea Cerințe privind aspectul și analiza structurală
Figura de mai jos prezintă desenul piesei unui capac de picior al unui aspirator robot de la o marcă renumită. Materialul este ABS, clasificat ca o componentă cosmetică. Dimensiunile piesei: Ø327,5 × 61,3 mm. Caracteristicile principale includ:
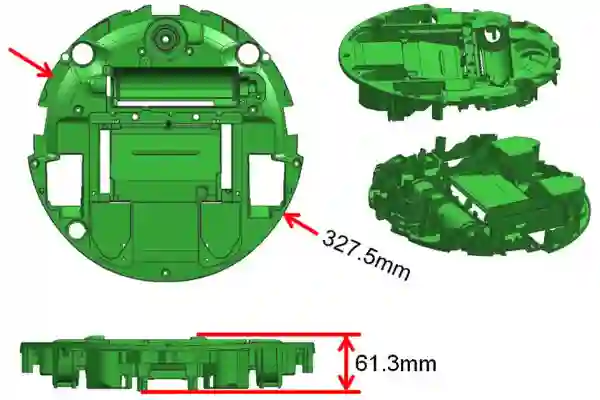
- Cerințe privind aspectul: Suprafața cosmetică trebuie să fie lipsită de defecte precum pete, urme de scufundare, linii de sudură și strălucire.
- Design cu dedesubt: O adâncitură există pe partea interioară a piesei, necesitând un mecanism de ridicare glisant sau înclinat.
- Complexitate structurală: Partea mare conține mai multe închideri, găuri pentru pini și nervuri, necesitând utilizarea extensivă a inserțiilor în miez/cavitate.
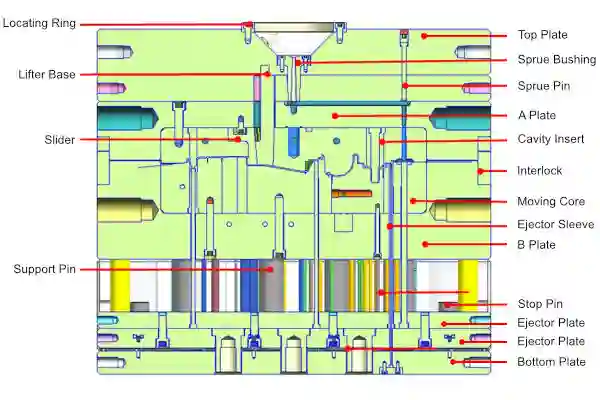
Proiectarea sistemului Gating
- Dispunere: Aranjamentul cavității 1×1 cu un sistem de sub-gate cu patru puncte.
- Detalii privind poarta: Trei porți trec de la porți secundare la porți principale (denumite în mod obișnuit "conversie de la poartă secundară la poartă principală"), în timp ce o poartă este poziționată direct pe suprafața exterioară a piesei. Porțile sunt amplasate la linia de separație și la suprafețele de închidere pentru a asigura o umplere echilibrată.
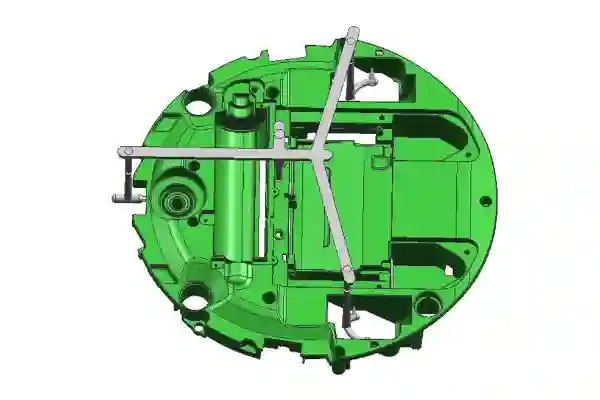
Proiectarea mecanismului de extragere a miezului lateral
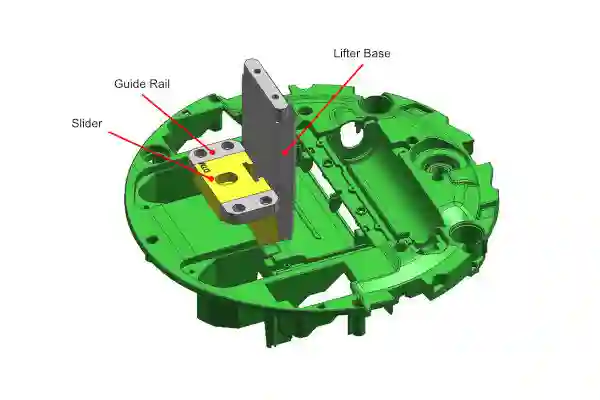
- Rezolvarea adânciturii: Decupajul de pe partea interioară (jumătate de matriță fixă) este rezolvat cu ajutorul unui mecanism intern de glisare.
- Considerații privind proiectarea cursorului:
- Pinul unghiular trebuie să fie complet etanș împotriva scurgerilor de plastic.
- O margine frontală conică pe știftul unghiular previne formarea de scântei din cauza presiunii de injecție.
Rezultate și discuții
Această matriță utilizează o structură inovatoare de "cursor intern fix al matriței", oferind o valoare de referință semnificativă pentru proiecte similare. Rezultatele cheie includ:
- Turnare lină și mișcare mecanică fiabilă în timpul producției pe termen lung.
- Dimensiuni stabile ale pieselor și asamblare fără sudură după turnare.
- Satisfacție ridicată a clienților datorită calității constante și eficienței economice.
